เครื่องวัดความถี่อิงตามวงจรรวม K155 ซีรี่ส์ เครื่องวัดความถี่ดิจิตอลอย่างง่าย ภูมิภาค Rostov
ไฟแสดงการเรืองแสงด้วยไฟฟ้าหลายหลักที่ออกแบบมาสำหรับการแสดงผลแบบไดนามิกมักมีจำหน่ายทั่วไป ข้อดีของตัวบ่งชี้ดังกล่าวคือราคาและความพร้อมใช้งานเป็นหลัก (ราคาของ IV-27M สิบสามหลักเท่ากับราคาของตัวบ่งชี้ LED หลักเดียว) วงจรมิเตอร์ความถี่ที่นำเสนอได้รับการพัฒนาสำหรับ IV-27M โดยเฉพาะ มิเตอร์ความถี่เป็นตัวเลขหกหลัก มีขีดจำกัดการวัดสองค่า: สูงสุด 1 MHz ด้วยความแม่นยำ 1 Hz และสูงถึง 50 MHz ด้วยความแม่นยำ 100 Hz
ความไวอินพุต 300 mV, ความต้านทานอินพุต 10 kOhm แผนผังแสดงในรูป สัญญาณที่สูงถึง 1 MHz จะถูกส่งไปยังอินพุต LF และสูงถึง 50 MHz ไปยังอินพุต HF การเลือกอินพุตทำได้โดยสวิตช์ S1 ในตำแหน่งที่แสดงในแผนภาพ อินพุตความถี่ต่ำจะเปิดอยู่ ในขณะที่พัลส์จากแอมพลิฟายเออร์ Shaper บนทรานซิสเตอร์ VT1-VT2 ไปที่สวิตช์อินพุตบน D1.1 โดยตรง ในตำแหน่งตรงข้าม S1 อินพุต RF จะเปิดขึ้น
ในกรณีนี้พัลส์จากเอาท์พุตของเชปเปอร์ถึง VT4-VT5 จะไปที่ตัวแบ่งความถี่สูงบนชิป D2 และ D3 ก่อนซึ่งแบ่งความถี่ด้วย 100 จากนั้นไปที่สวิตช์อินพุต ความถี่ 50 MHz ในโหมดนี้ถูกจำกัดโดยความถี่คัตออฟของไมโครวงจร K555IE2 เท่านั้น หากคุณใช้ K155IE2 แทนไมโครวงจรเหล่านี้ ความถี่คัตออฟจะลดลง - สูงสุด 30 MHz หากคุณสร้างตัวแบ่งบนไมโครวงจรความถี่สูง คุณจะสามารถวัดได้สูงสุดถึง 100 MHz
พัลส์จากเอาต์พุต D1.1 จะถูกส่งไปยังตัวนับหกบิตบนชิป D4-D9 พร้อมตัวถอดรหัสบน D12-D17 ชิป D4-D9 แต่ละตัวทำงานในโหมดนับทศนิยม
การบ่งชี้แบบไดนามิกถูกนำมาใช้โดยใช้ตัวนับ D19 อินพุตรับพัลส์ด้วยความถี่ 1,024 Hz จากเอาต์พุต "F" ของ D10 เอาต์พุตทั้งหมดของตัวถอดรหัส D12-D17 เชื่อมต่อแบบขนานและเชื่อมต่อกับขั้วบวกส่วนของตัวบ่งชี้การปล่อยก๊าซ เอาต์พุตตัวถอดรหัสมีความสามารถในการสลับไปยังสถานะปิดใช้งานเมื่อมีการใช้โลจิคัลกับพิน 7
ตัวนับ D19 จะจ่ายศูนย์สลับกันให้กับอินพุตเหล่านี้ของตัวถอดรหัสต่างๆ (อันจากเอาต์พุต D19 จะถูกกลับด้านโดยใช้ D20) ดังนั้นในเวลาที่กำหนด เอาต์พุตของตัวถอดรหัสเพียงตัวเดียวจะเปิดทำงาน และเอาต์พุตของตัวถอดรหัสอื่นๆ ทั้งหมดจะถูกปิด ในเวลาเดียวกัน หน่วย (สูงสุด D20) จะถูกส่งไปยังกริดที่สอดคล้องกันของบิตที่ตัวถอดรหัสเปิดอยู่ ดังนั้น ตัวเลขหกหลักจึงแสดงตามลำดับ แต่เนื่องจากความเฉื่อยในการมองเห็น ดูเหมือนว่าตัวเลขทั้งหมดจะสว่างพร้อมกัน
จากตัวเลขสิบสามหลักของ IV-27M มีเพียงหกหลักเท่านั้น ดังนั้นเพื่อระบุโหมดความถี่สูงจึงรวมตัวเลขลำดับต่ำอีกสองหลักไว้ด้วยซึ่งมีศูนย์เสมอ การอ่านในนั้นจะไม่เปลี่ยนแปลง แต่อนุญาตให้คุณอ่านผลการวัดบน HF โดยไม่ต้องคูณด้วย 100 (แทนที่จะเป็น "X100" จะเพิ่มศูนย์อีกสองตัว)
เพื่อจุดประสงค์นี้ มีการใช้ตัวถอดรหัส D18 โดยมีการจ่ายศูนย์ให้กับอินพุตอย่างต่อเนื่อง และเมื่อเอาต์พุตเปิดอยู่ จะมีรหัสเจ็ดส่วนที่มีหมายเลข "0" ในกรณีนี้ ตัวนับ D19 จะรวมกริดของตัวเลขต่ำสุดสองหลัก ซึ่งในกรณีนี้บทบาทของอินเวอร์เตอร์จะดำเนินการโดย VT7
อุปกรณ์ควบคุมทำบน D10, D11, D1.2, D1.3 ชิป D10 สร้างพัลส์ที่มีความถี่ 1 Hz เพื่อควบคุมโหมดการวัด และพัลส์ที่ 1024 Hz สำหรับการบ่งชี้แบบไดนามิก
สมมติว่าทริกเกอร์ D11 อยู่ในสถานะเดียว ในกรณีนี้ สวิตช์ D1.1 จะถูกปิด และไม่ได้รับพัลส์ที่อินพุตตัวนับ เมื่อพัลส์แรกมาถึงอินพุต C, D11 จะถูกตั้งค่าเป็นศูนย์และ D1.1 เปิดขึ้น พัลส์อินพุตจะถูกนับ จากนั้นพัลส์ถัดไปจะมาถึงที่ D11 และ D11 จะถูกตั้งค่าเป็นสถานะเดียว
ในกรณีนี้ D1.1 จะปิดและการนับพัลส์อินพุตจะหยุดลง ในเวลาเดียวกันพัลส์สั้นจะถูกสร้างขึ้นโดยวงจร C5R14 ซึ่งถูกส่งไปยังพิน 1 ของตัวถอดรหัส D12-D17 และเขียนผลการวัดลงในรีจิสเตอร์
จากนั้นหลังจากพัลส์นี้ หลังจากเวลาที่วงจร R17C10 กำหนด พัลส์ดังกล่าววินาทีจะถูกสร้างขึ้นโดยใช้วงจร C9R16 ซึ่งจะรีเซ็ตตัวนับ D4-D9 ดังนั้นการอ่านมิเตอร์ความถี่จึงเปลี่ยนทุกๆ สองวินาที
แหล่งพลังงานไม่เสถียรบนหม้อแปลง T1 หม้อแปลงนำเข้าสำเร็จรูป (น่าจะเป็นภาษาจีน) - 230V / 2X6V / 300 mA แรงดันไฟฟ้า 8V ไม่เพียงพอสำหรับ IV-27M ดังนั้นแคโทดจึงได้รับพลังงานจากแรงดันไฟฟ้าเชิงลบ
ตัวบ่งชี้ IV-27M มีเทอร์มินัลทั้งสองด้านของกระบอกสูบ ดังนั้นเทอร์มินัลที่ส่วนท้ายซึ่งมี 15 เทอร์มินัลจึงถูกระบุบนไดอะแกรมโดยไม่มีตัวอักษร และเทอร์มินัลที่ส่วนท้ายซึ่งมี 11 เทอร์มินัล มีเครื่องหมายตัวอักษร A กำกับไว้ การอ่านขั้วต่อก็เหมือนกับหลอดไฟทั่วไป - หมุนปลายเข้าหาตัวคุณแล้วนับตามเข็มนาฬิกาจากพินที่หายไป (ช่องว่างขนาดใหญ่ระหว่างพินแรกและพินสุดท้าย)
นักวิทยุสมัครเล่นหลายคนมีวงจรไมโครซีรีส์ K155 เก่าจำนวนมากวางอยู่ในถังขยะ ซึ่งทำให้เกิดคำถามในการใช้งาน เป็นทางเลือกสำหรับการประกอบเครื่องวัดความถี่ที่ดีพร้อมจอแสดงผลดิจิตอล เครื่องวัดความถี่ที่ประกอบช่วยให้คุณสามารถวัดความถี่ของการสั่นทางไฟฟ้าของฮาร์มอนิกแบบไซน์และพัลส์จากหน่วยเฮิรตซ์ถึงสิบเมกะเฮิรตซ์และแอมพลิจูดตั้งแต่ 0.15 ถึง 10 V รวมถึงพัลส์สัญญาณนับ แผนภาพบล็อกของเครื่องวัดความถี่แสดงไว้ในรูปที่ 1 1 การทำงานของอุปกรณ์ขึ้นอยู่กับการนับจำนวนพัลส์ในช่วงเวลาหนึ่งซึ่งเป็นแบบอย่างสัญญาณที่กำลังศึกษาจะถูกป้อนเข้าที่อินพุตของแรงดันพัลส์เดิม ที่เอาต์พุตจะเกิดการสั่นทางไฟฟ้าเป็นรูปสี่เหลี่ยมผืนผ้าซึ่งสอดคล้องกับความถี่ของสัญญาณอินพุตซึ่งจะถูกส่งไปยังกุญแจอิเล็กทรอนิกส์ พัลส์ความถี่มาตรฐานยังมาถึงที่นี่ผ่านอุปกรณ์ควบคุม โดยจะเปิดกุญแจในช่วงเวลาหนึ่ง การระเบิดของพัลส์จะปรากฏขึ้นที่เอาต์พุตของกุญแจอิเล็กทรอนิกส์ จำนวนพัลส์ในแพ็กเก็ตจะถูกนับโดยตัวนับทศนิยมฐานสอง สถานะของพัลส์หลังจากปิดคีย์จะแสดงโดยหน่วยบ่งชี้ดิจิทัลที่ทำงานในช่วงระยะเวลาของพัลส์อ้างอิง เช่น หนึ่งวินาที.
ในโหมดการนับพัลส์ อุปกรณ์ควบคุมจะบล็อกแหล่งความถี่อ้างอิง ตัวนับทศนิยมไบนารี่จะนับพัลส์ที่มาถึงอินพุตอย่างต่อเนื่อง และหน่วยแสดงผลดิจิทัลจะแสดงผลการนับ

แผนผังของเครื่องวัดความถี่แสดงในรูปที่ 1 2. อดีตพัลส์แรงดันไฟฟ้าถูกประกอบบนวงจรไมโคร K155LD1 (DD1) และเป็นทริกเกอร์ Schmitt ที่ซับซ้อน ตัวต้านทาน R1 จำกัดกระแสอินพุตและไดโอด VD1 ปกป้องไมโครวงจรจากการเปลี่ยนแปลงแรงดันไฟฟ้าอินพุตของขั้วลบ ตัวต้านทาน R3 จำกัดขีดจำกัดล่างของแรงดันสัญญาณอินพุต จากเอาต์พุตของไดรเวอร์ (พิน 9 ของไมโครวงจร) พัลส์สี่เหลี่ยมจะถูกส่งไปยังหนึ่งในอินพุตขององค์ประกอบลอจิคัล DD11.1 ซึ่งทำหน้าที่ของกุญแจอิเล็กทรอนิกส์

บล็อกความถี่อ้างอิงประกอบด้วยเครื่องกำเนิดตามองค์ประกอบ DD2.1 - DD2.3 ความถี่พัลส์ซึ่งเสถียรโดยเครื่องสะท้อนควอทซ์ ZQ1 และตัวแบ่งความถี่เจ็ดขั้นตอนบนวงจรไมโคร DD3 - DD9 ความถี่ของเครื่องสะท้อนเสียงแบบควอตซ์คือ 8 MHz ชิป DD3 แบ่งความถี่ด้วย 8 และชิปของแต่ละสเตจต่อมาจะแบ่งความถี่ด้วย 10 ความถี่พัลส์ที่เอาต์พุตของ DD9 คือ 1 Hz ช่วงของความถี่ที่วัดได้ถูกกำหนดโดยสวิตช์ SA1 หากต้องการวัดความถี่ของสัญญาณได้แม่นยำยิ่งขึ้นด้วยสวิตช์ SA1 จำเป็นต้องเลือกช่วงการวัดที่เหมาะสม โดยย้ายจากช่วงความถี่ที่สูงกว่าไปเป็นช่วงความถี่ต่ำ อุปกรณ์ควบคุมประกอบด้วยทริกเกอร์ DD10.1 และ DD10.2 อินเวอร์เตอร์ DD11.3, DD11.4 และทรานซิสเตอร์ VT1 ซึ่งสร้างเครื่องมัลติไวเบรเตอร์สแตนด์บาย อินพุต C ของทริกเกอร์ DD10.1 รับพัลส์จากบล็อกความถี่อ้างอิง และจะสลับไปที่สถานะเดียว และด้วยสัญญาณลอจิคัล 1 จะเปิดคีย์อิเล็กทรอนิกส์ DD11.1 จากช่วงเวลานี้ พัลส์ของความถี่ที่วัดได้จะผ่าน คีย์และอินเวอร์เตอร์ D11.2 และป้อนอินพุตของตัวนับ DD12 ที่ขอบของพัลส์ถัดไป DD10.1 จะใช้สถานะเริ่มต้นและสลับทริกเกอร์ DD10.2 เป็นสถานะเดียว

ในทางกลับกัน ทริกเกอร์ DD10.2 ที่มีระดับศูนย์ลอจิคัลที่เอาต์พุตผกผันจะบล็อกอินพุตของอุปกรณ์ควบคุมจากอิทธิพลของพัลส์ของความถี่อ้างอิง และด้วยระดับลอจิคัลหนึ่งระดับที่เอาต์พุตโดยตรง จะเริ่มการทำงานของมัลติไวเบรเตอร์สแตนด์บาย กุญแจอิเล็กทรอนิกส์ถูกปิดด้วยระดับลอจิคัลเป็น 0 ที่เอาต์พุตโดยตรง DD10.1 การระบุจำนวนพัลส์ในแพ็คเก็ตที่มาถึงที่อินพุตตัวนับเริ่มต้นขึ้น ด้วยการปรากฏตัวของระดับลอจิคัล 1 ที่เอาต์พุตโดยตรงของทริกเกอร์ DD10.2 ตัวเก็บประจุ C3 จะเริ่มชาร์จผ่านตัวต้านทาน R9 ขณะชาร์จ แรงดันไฟฟ้าที่ฐานของทรานซิสเตอร์ VT1 จะเพิ่มขึ้น เมื่อถึง 0.6 V ทรานซิสเตอร์จะเปิดขึ้นและแรงดันไฟฟ้าที่ตัวสะสมจะลดลงจนเกือบเป็นศูนย์ สัญญาณลอจิคัล 1 ที่ปรากฏที่เอาต์พุตขององค์ประกอบ DD11.3 ส่งผลต่ออินพุต R0 ของวงจรไมโคร DD12, DD14, DD16 ซึ่งเป็นผลมาจากการที่ตัวนับถูกรีเซ็ตเป็น 0 ตัวบ่งชี้การวัดจะหยุดลง ในเวลาเดียวกัน สัญญาณลอจิคัล 0 จะปรากฏขึ้นที่พิน 11 ของอินเวอร์เตอร์ DD11.4 สลับทริกเกอร์ DD10.2 และมัลติไวเบรเตอร์สแตนด์บายเป็นสถานะดั้งเดิม ตัวเก็บประจุ C3 ถูกปล่อยออกมาผ่านไดโอด VD2 และไมโครวงจร DD10.2 เมื่อพัลส์ความถี่อ้างอิงถัดไปปรากฏที่อินพุต DD10.1 วงจรการทำงานของอุปกรณ์ในโหมดการวัดครั้งต่อไปจะเริ่มต้นขึ้น หากต้องการเปลี่ยนเครื่องวัดความถี่เป็นโหมดการนับพัลส์ต่อเนื่อง ให้ตั้งสวิตช์ SA2 ไปที่ตำแหน่ง "การนับ" ในกรณีนี้สวิตช์ทริกเกอร์ DD11.1 และ 1 จะปรากฏขึ้นที่เอาต์พุตโดยตรง ปุ่ม DD11.1 เปิดอยู่และพัลส์จะถูกส่งไปยังอินพุตของตัวนับพัลส์อย่างต่อเนื่อง การอ่านค่าตัวนับจะถูกรีเซ็ตโดยการกดปุ่ม "รีเซ็ต" แหล่งจ่ายไฟของเครื่องวัดความถี่ (รูปที่ 3) ประกอบด้วยหม้อแปลง T1, วงจรเรียงกระแส VD3, ตัวปรับแรงดันไฟฟ้า VD5, VT2 และตัวกรองบนตัวเก็บประจุ C9 - C11 โดยให้แรงดันไฟฟ้า 5 V เพื่อจ่ายไฟให้กับวงจรขนาดเล็ก
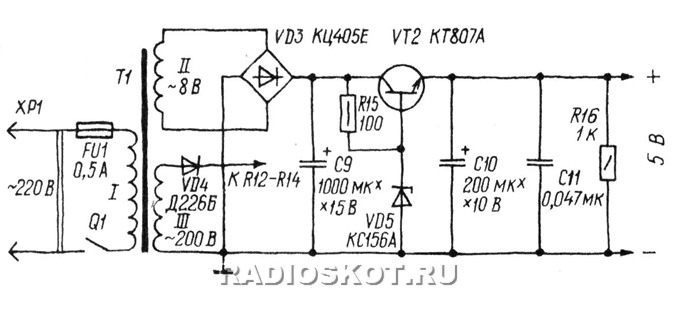
แรงดันไฟฟ้าจากขดลวด III ของหม้อแปลงถูกจ่ายผ่านไดโอด VD5 ไปยังวงจรไฟฟ้าของตัวบ่งชี้ดิจิตอลปล่อยก๊าซ การก่อสร้างและรายละเอียด ชิ้นส่วนเครื่องวัดความถี่ติดตั้งอยู่บนแผงวงจรพิมพ์ ตัวบ่งชี้การปล่อยก๊าซ IN1 ถูกใช้เป็นตัวบ่งชี้ หม้อแปลงจ่ายไฟ T1 ผลิตขึ้นบนแกนแม่เหล็ก ShL 20x32 ขดลวด 1 มี 111650 รอบด้วยลวด PEV-1 0.1 ขดลวด 2 มี 55 รอบด้วยลวด PEV-1 0.47 ขดลวด 3 – 1500 รอบด้วยลวด PEV-1 0.1 มีการติดตั้งทรานซิสเตอร์ T2 บนหม้อน้ำ แทนที่จะเป็นพัลส์เชปเปอร์บนไมโครวงจร K155LD1 คุณสามารถประกอบเชปเปอร์ตามวงจรในรูปที่ 1 4

นอกจากนี้ การออกแบบยังเพิ่มจำนวนตัวบ่งชี้ดิจิทัลเป็น 5 ตัว และตามด้วยจำนวนชิปตัวนับ K155IE2 และชิปตัวถอดรหัส K155ID1 การขยายจอแสดงผลดิจิตอลช่วยให้แสดงข้อมูลได้สะดวกยิ่งขึ้น การตั้งค่าอุปกรณ์ลงมาคือการตรวจสอบการติดตั้งที่ถูกต้องและการวัดแรงดันไฟฟ้า เครื่องวัดความถี่ที่ประกอบอย่างถูกต้องทำงานได้อย่างมั่นใจ โดยธรรมชาติแล้ว ตัวบ่งชี้สุญญากาศสามารถถูกแทนที่ด้วย LED รุ่น ALS ที่ทันสมัยกว่า และวงจรขนาดเล็กที่มีซีรี่ส์ใหม่ที่คล้ายกัน
อภิปรายบทความ FREQUENCY METER
โครงร่างของเครื่องวัดความถี่ดิจิตอลที่ง่ายมากซึ่งใช้ส่วนประกอบจากต่างประเทศ
สวัสดีตอนบ่ายนักวิทยุสมัครเล่นที่รัก!
ยินดีต้อนรับสู่เว็บไซต์ “”
ในบทความนี้บนเว็บไซต์ นักวิทยุสมัครเล่นเราจะดูอีกอันที่เรียบง่าย แผนภาพวิทยุสมัครเล่น – เครื่องวัดความถี่- เครื่องวัดความถี่ถูกประกอบบนฐานองค์ประกอบต่างประเทศซึ่งบางครั้งก็มีราคาถูกกว่าในประเทศ โครงการนี้เรียบง่ายและง่ายต่อการทำซ้ำ สำหรับนักวิทยุสมัครเล่นมือใหม่.
วงจรมิเตอร์ความถี่:
เครื่องวัดความถี่สร้างขึ้นบนเคาน์เตอร์วัด HFC4026BEY, วงจรไมโครซีรีย์ CD40 และไฟ LED แสดงสถานะเจ็ดส่วนพร้อมแคโทดทั่วไป HDSP-H211H ด้วยแรงดันไฟฟ้าของแหล่งจ่ายไฟ 12 โวลต์ มิเตอร์ความถี่จึงสามารถวัดความถี่ได้ตั้งแต่ 1 Hz ถึง 10 MHz
ชิป HFC4026BEY เป็นตัวแทนของตรรกะ CMOS ความเร็วสูง และมีตัวนับทศนิยมและตัวถอดรหัสสำหรับตัวบ่งชี้ LED แคโทดทั่วไปเจ็ดส่วน พัลส์อินพุตจะจ่ายให้กับอินพุต "C" ซึ่งมีทริกเกอร์ Schmitt ซึ่งทำให้สามารถลดความซับซ้อนของวงจรของพัลส์เชปเปอร์อินพุตได้อย่างมาก นอกจากนี้อินพุตของตัวนับ "C" สามารถปิดได้โดยใช้ลอจิคัลเพื่อพิน 2 ของไมโครวงจร ดังนั้นจึงไม่จำเป็นต้องมีอุปกรณ์คีย์ภายนอกที่ส่งพัลส์ไปยังอินพุตตัวนับในระหว่างระยะเวลาการวัด คุณสามารถปิดตัวบ่งชี้ได้โดยใช้ศูนย์ลอจิคัลกับพิน 3 ทั้งหมดนี้ทำให้วงจรควบคุมมิเตอร์ความถี่ง่ายขึ้น
แอมพลิฟายเออร์อินพุตทำโดยใช้ทรานซิสเตอร์ VT1 ตามวงจรสวิตช์ มันจะแปลงสัญญาณอินพุตเป็นพัลส์ที่มีรูปร่างตามอำเภอใจ ความสี่เหลี่ยมจัตุรัสของพัลส์ถูกกำหนดโดยทริกเกอร์ Schmitt ซึ่งอยู่ที่อินพุต "C" ของไมโครเซอร์กิต ไดโอด VD1-VD4 จำกัด ความกว้างของสัญญาณอินพุต เครื่องกำเนิดสัญญาณอ้างอิงถูกสร้างขึ้นบนชิป CD4060B ในกรณีของการใช้เครื่องสะท้อนเสียงแบบควอตซ์ที่มีความถี่ 32768 Hz ความถี่ 4 Hz จะถูกลบออกจากพิน 2 ของไมโครวงจร ซึ่งจ่ายให้กับวงจรควบคุมซึ่งประกอบด้วยตัวนับทศนิยม D2 และฟลิปฟล็อป RS สองตัวบน ชิป D3 หากคุณใช้ตัวสะท้อนความถี่ 16384 Hz (จากนาฬิกาปลุกจีน) ความถี่ 4 Hz จะต้องถูกลบออกไม่ใช่จากพิน 2 ของไมโครวงจร แต่จากพิน 1
สามารถเปลี่ยนชิป CD4060B ด้วยอะนาล็อกอื่นประเภท xx4060 (เช่น NJM4060) ไมโครวงจร CD4017B สามารถถูกแทนที่ด้วยอะนาล็อกอื่นประเภท xx4017 หรือด้วยไมโครวงจร K561 IE8, K176 IE8 ในประเทศ ไมโครวงจร CD4001B เป็นอะนาล็อกโดยตรงของไมโครวงจร K561IE5, K176IE5 ของเรา สามารถเปลี่ยนชิป HFC4026BEY ด้วย CD4026 แบบอะนาล็อกที่สมบูรณ์ได้ แต่ความถี่ที่วัดได้สูงสุดคือ 2 MHz วงจรอินพุตของเครื่องวัดความถี่เป็นแบบดั้งเดิมสามารถแทนที่ด้วยหน่วยขั้นสูงบางอันได้
การออกแบบเครื่องวัดความถี่ดิจิทัลส่วนใหญ่ที่อธิบายไว้ในวรรณกรรมมีส่วนประกอบที่หายากจำนวนมาก และใช้เครื่องสะท้อนเสียงแบบควอตซ์ที่มีราคาแพงเป็นแหล่งความถี่ที่เสถียรในอุปกรณ์ดังกล่าว เป็นผลให้เครื่องวัดความถี่มีความซับซ้อนและมีราคาแพง
เรานำเสนอคำอธิบายของเครื่องวัดความถี่อย่างง่ายพร้อมการอ่านข้อมูลแบบดิจิทัลแก่ผู้อ่าน ซึ่งเป็นแหล่งที่มาของความถี่ที่เสถียร (อ้างอิง) ซึ่งเป็นเครือข่ายกระแสสลับ 50 Hz อุปกรณ์นี้จะใช้สำหรับการวัดต่างๆ ในการฝึกปฏิบัติด้านวิทยุสมัครเล่น เช่น เป็นเครื่องชั่งที่ปรับเทียบแล้วในเครื่องกำเนิดความถี่เสียง เพื่อเพิ่มความน่าเชื่อถือ หรือแทนที่เครื่องวัดความถี่ตัวเก็บประจุขนาดใหญ่ ด้วยเซ็นเซอร์ LED หรือแม่เหล็ก อุปกรณ์นี้สามารถใช้เพื่อตรวจสอบความเร็วของมอเตอร์ไฟฟ้า ฯลฯ
ลักษณะทางเทคนิคหลัก
เครื่องวัดความถี่ดิจิตอล:
ช่วงความถี่ที่วัดได้ Hz …… .. 10-999.9X10 3
ค่าประสิทธิผลของแรงดันไฟฟ้าขาเข้า V…….0.02-5
เวลาในการวัด, s…. 0.01; 0.1; 1
การใช้พลังงาน W…. 3
ข้อผิดพลาดในการวัดและการนับ……..±4 Raj10 -3 ±1
ข้อผิดพลาดในการวัดความถี่สัมพัทธ์ทั้งหมดถูกกำหนดโดยความสัมพันธ์:
b1=±เดิมพัน± 1/N,
โดยที่การเดิมพันคือข้อผิดพลาดความถี่ของความถี่อ้างอิง
1/N - ข้อผิดพลาดความไม่ต่อเนื่อง (ไม่ขึ้นอยู่กับความถี่ที่วัดได้ และเท่ากับ ±1 การนับของหลักที่มีนัยสำคัญน้อยที่สุด)
จากสูตรข้างต้น จะเห็นได้ว่าข้อผิดพลาดในการวัดขึ้นอยู่กับความเสถียรของความถี่เครือข่าย 50 Hz โดยตรง ตาม GOST ความไม่เสถียรของความถี่เครือข่าย 50 Hz คือ ± 0.2 Hz ต่อ 10 นาที ดังนั้น ข้อผิดพลาดสัมพัทธ์ของมิเตอร์ความถี่จึงถือว่าเท่ากับ ±4X10 -3 ±1 จำนวนนับ ในการวัดภาคปฏิบัติ ค่าคลาดเคลื่อนสัมพัทธ์ของมิเตอร์ความถี่คือ ±2X X10 -3 ±1 จำนวนนับ
การทำงานของเครื่องวัดความถี่ขึ้นอยู่กับการนับจำนวนคาบของสัญญาณที่วัดได้เหนือช่วงเวลามาตรฐาน (0.01; 0.1; 1 วินาที) ผลการวัดจะแสดงบนจอแสดงผลดิจิตอลและทำซ้ำโดยอัตโนมัติในช่วงเวลาที่กำหนด
เครื่องวัดความถี่ (รูปที่ 1) ประกอบด้วย: เครื่องขยายสัญญาณอินพุต, ตัวเลือกเวลา, ตัวนับทศวรรษ, ตัวบ่งชี้ดิจิตอล, เครื่องจำลองเครือข่าย, เครื่องจำลองช่วงเวลาอ้างอิง, อุปกรณ์ควบคุมและรีเซ็ต และแหล่งจ่ายไฟ
ในเครื่องขยายสัญญาณ Shaper สัญญาณของความถี่ที่วัดได้ fx จะถูกขยายและแปลงเป็นพัลส์สี่เหลี่ยมที่มีความถี่เดียวกัน ซึ่งจ่ายให้กับหนึ่งในอินพุตของตัวเลือกเวลา พัลส์สี่เหลี่ยมของช่วงเวลาอ้างอิงจะจ่ายให้กับอินพุตอื่นจากอุปกรณ์ควบคุมและรีเซ็ต ตัวจำลองเครือข่ายสร้างพัลส์สี่เหลี่ยมที่มีความถี่ 100 Hz
เวลาในการวัดระหว่างที่ตัวเลือกเปิดอยู่จะถูกเลือกโดยสวิตช์ SA ในขณะที่พัลส์อ้างอิงมาถึง ตัวเลือกเวลาจะเปิดขึ้น และแพ็กเก็ตของพัลส์สี่เหลี่ยมของความถี่ fx ที่วัดได้จะปรากฏขึ้นที่เอาท์พุต ระยะเวลาของการระเบิดจะสอดคล้องกับระยะเวลาของพัลส์อ้างอิงที่เลือกโดยสวิตช์ SA ถัดไป พัลส์ในแพ็กเก็ตจะถูกนับและแสดงบนจอแสดงผลดิจิตอล
หลังจากที่เวลาบ่งชี้หมดลง พัลส์รีเซ็ต (จากอุปกรณ์ควบคุมและอุปกรณ์รีเซ็ต) จะทำงานบนตัวเลือกเวลา และการแสดงตัวนับสิบวันจะถูกล้าง และตัวเลือกจะพร้อมสำหรับรอบการวัดใหม่
แผนผังของเครื่องวัดความถี่อยู่ในรูปที่ 2 สัญญาณอินพุตของความถี่ที่วัดได้จะถูกขยายโดยเครื่องขยายสัญญาณตัวต้านทานบนทรานซิสเตอร์ VT1 และสุดท้ายจะถูกสร้างขึ้นโดยองค์ประกอบ DD4.1, DD4.2 เป็นลำดับของพัลส์สี่เหลี่ยมของการวัด ความถี่. วงจรอินพุต VT1 มีการป้องกันกระแส (R3) และแรงดันไฟฟ้า (VD1) จากพิน 6 ของ DD4.2 พัลส์สี่เหลี่ยมของสัญญาณอินพุตจะถูกส่งไปยังหนึ่งในอินพุต (พิน 9 ของ DD4.3) ของตัวคั่นเวลา พัลส์สี่เหลี่ยมของช่วงเวลาอ้างอิงจะจ่ายให้กับอินพุตที่สอง (พิน 10 ของ DD4.3) ที่จุดสิ้นสุดของพัลส์อ้างอิง ตัวเลือกเวลาจะถูกบล็อก พัลส์อินพุตจะไม่ผ่านไปยังตัวนับ
การนับพัลส์อินพุตจะดำเนินการโดยตัวนับสี่หลักบนชิป DD6-DD9 และตัวบ่งชี้ HG1-HG4 จะแสดงความถี่ของสัญญาณอินพุตในรูปแบบดิจิทัล
วงจรเรียงกระแสแรงดันไฟหลักทำโดยใช้ไดโอด VD10-VD13 แรงดันไฟฟ้าแบบเป็นจังหวะ (ที่ความถี่ 100 Hz) จะถูกแปลงโดยทริกเกอร์ Schmitt (DD1.1, DD1.2) เป็นพัลส์สี่เหลี่ยมที่มีความถี่ 100 Hz ซึ่งจากนั้นจะถูกป้อนให้กับตัวแบ่งทศวรรษแบบสองขั้นตอน DD2, DD3 . ดังนั้นที่เอาต์พุตของวงจรไมโคร DD1.2 (พิน 11), DD2 (พิน 5), DD3 (พิน 5) ได้รับพัลส์ของช่วงเวลาอ้างอิง 0.01, 0.1 และ 1 วินาที เวลาในการวัดถูกกำหนดโดยสวิตช์ SA2
อุปกรณ์ควบคุมและรีเซ็ตประกอบด้วย D-triggers DD5.1 และ DD5.2 และทรานซิสเตอร์ VT2 และ VT3 การนับความถี่ของสัญญาณอินพุตเริ่มต้นเมื่อขอบนำของพัลส์อ้างอิงมาถึงจากสวิตช์ SA2.1 ไปยังอินพุต D ของฟลิปฟล็อป DD5.1 ซึ่งจะเปลี่ยนเป็นสถานะ "เดี่ยว"

ข้าว. 1. แผนภาพบล็อกของเครื่องวัดความถี่:
1 - เครื่องขยายสัญญาณอินพุต, ตัวเลือก 2 เวลา, ตัวนับ 3 - ทศวรรษ, 4 - ตัวบ่งชี้ดิจิตอล, 5 - ตัวจำลองเครือข่าย, 6 - ตัวกำหนดช่วงเวลาอ้างอิง, 7 - อุปกรณ์ควบคุมและรีเซ็ต, 8 - แหล่งจ่ายไฟ
พิน 10 DD4.3 ของตัวเลือกเวลาจากทริกเกอร์ DD5.1 (พิน 5) ได้รับสัญญาณลอจิคัล 1 และอนุญาตให้ส่งผ่านพัลส์สี่เหลี่ยมของความถี่อินพุตไปยังอินพุตของตัวนับ DD6 (พิน 4) หลังจากผ่านไปช่วงเวลาอ้างอิงที่เลือก (0.01, 0.1, 1 วินาที) พัลส์อ้างอิงจะถูกส่งอีกครั้งให้กับอินพุต D ของทริกเกอร์ DD5.1 ทริกเกอร์จะกลับสู่สถานะดั้งเดิมโดยบล็อกตัวเลือกเวลาและสลับ DD5.2 ทริกเกอร์เป็นสถานะ "เดี่ยว" กระบวนการระบุความถี่ของสัญญาณอินพุตบนจอแสดงผลดิจิตอลเริ่มต้นขึ้น
สัญญาณลอจิคัล 1 ปรากฏที่พิน 9 ของ DD5.2 และกระบวนการชาร์จตัวเก็บประจุ C5 เริ่มต้นผ่านตัวต้านทาน R11 ทันทีที่แรงดันไฟฟ้าที่ฐานของทรานซิสเตอร์ VT2 ถึงแรงดันไฟฟ้าประมาณ 1.2 V ทรานซิสเตอร์จะเปิดขึ้นและพัลส์ลบสั้น ๆ จะปรากฏขึ้นบนตัวสะสมซึ่งผ่าน MS DD1.3, DD1.4 จะเปลี่ยนทริกเกอร์ DD5 .2 กลับสู่สภาพเดิม ตัวเก็บประจุ C5 ผ่านไดโอด VD2 และไมโครวงจร DD5.2 จะคายประจุอย่างรวดเร็วจนเกือบเป็นศูนย์

ข้าว. 2. แผนผังของอุปกรณ์:
วว1, วว4 K155LAZ;วว3 K155IE1;วว5 เค.155TM2;วว6- วว9 K176IE4;วี.ดี.6- วี.ดี.9D226A,วี.ดี.10- วี.ดี.13 D9B,เอช.จี.1- เอช.จี.4 IV สำหรับ

ข้าว. 3. ลักษณะของเครื่องวัดความถี่

รเป็น. 5. เค้าโครงขององค์ประกอบในตัวเครื่องมิเตอร์ความถี่:
1 - ตัวบ่งชี้เครือข่าย, 2 - สวิตช์เครือข่าย, 3 - หม้อแปลงไฟฟ้า, 4 - ตัวยึดฟิวส์, 5 - แผงวงจรพิมพ์, 6 - ตัวกรองแสง, สวิตช์ช่วงเวลา 7 -
พัลส์รีเซ็ตเชิงลบบนตัวสะสม VT2 นั้นกลับด้านโดยทรานซิสเตอร์ VT3 ซึ่งส่งผลต่ออินพุต R ของวงจรไมโคร DD6-DD9 และรีเซ็ตการอ่าน - การบ่งชี้ผลการวัดจะหยุดลง เมื่อมาถึงด้านหน้าของพัลส์อ้างอิงถัดไป กระบวนการจะทำซ้ำ
เครื่องวัดความถี่ใช้ตัวต้านทาน MLT-0.25, ตัวเก็บประจุ K50-6 และ KLS ทรานซิสเตอร์ KT315 และ KT361 ที่ระบุในวงจร (พร้อมดัชนีตัวอักษรใด ๆ ) จะถูกแทนที่ด้วยทรานซิสเตอร์ความถี่สูงซิลิกอนที่มีโครงสร้างที่สอดคล้องกัน แทนที่จะใช้ไดโอด KD522B คุณสามารถใช้ซีรีย์ KD521, KD520 ใดก็ได้ สามารถเปลี่ยนไดโอด GD511B เป็น D9 ได้
สามารถเปลี่ยนชิปของซีรีย์ K155 ด้วยชิปที่คล้ายกันของซีรีย์ K133 ตัวบ่งชี้ IV-ZA จะถูกแทนที่ด้วย IV-3 หม้อแปลงไฟฟ้ามีกำลังไฟ 5-7 W. แรงดันไฟฟ้าที่คดเคี้ยว: II - 0.85 V (กระแส 200 mA), III - 10 V (กระแส 200 mA), IV - 10 V (กระแส 15 mA) ไดโอดบริดจ์ VD6-VD9 และ VD10-VD13 สามารถจ่ายไฟได้จากขดลวด 10 V หนึ่งเส้น (กระแสอย่างน้อย 220 mA) ทรานซิสเตอร์ VT4 มีหม้อน้ำขนาด 20X30X1 มม. ทำจากแผ่นอลูมิเนียมสองแผ่นซึ่งติดอยู่กับทรานซิสเตอร์ทั้งสองด้านโดยใช้สกรูและน็อต M3


ข้าว. 4. แผงวงจรพิมพ์พร้อมแผนผังการจัดองค์ประกอบ
เครื่องวัดความถี่ได้รับการผลิตขึ้นเพื่อทดแทนสเกลที่สอบเทียบแล้วในเครื่องกำเนิดความถี่ต่ำ (LFO) ดรัมดิจิทัลถูกลบออกจากเครื่องกำเนิดไฟฟ้าแล้ว หน้าต่างแสดงผลที่ปกคลุมด้วยลูกแก้วโปร่งใสพร้อมตัวกรองแสงสีเขียวประกอบด้วยตัวบ่งชี้ดิจิทัล (รูปที่ 3)
เครื่องวัดความถี่ยังสามารถใช้เพื่อวัตถุประสงค์ที่ต้องการได้ เพื่อจุดประสงค์นี้ จึงมีการแนะนำสวิตช์ SA1 ซึ่งอยู่ที่แผงด้านหน้าของเครื่องกำเนิดไฟฟ้า
แผงวงจรพิมพ์ของเครื่องวัดความถี่ทำจากฟอยล์ getinax ที่มีความหนา 1.5-2 มม. (รูปที่ 4) การเชื่อมต่อตัวบ่งชี้ HG1-HG4 กับวงจรรวม DD6-DD9 ทำจากด้านข้างของตัวนำที่พิมพ์
ขอแนะนำให้ทำการเชื่อมต่อทั้งหมดด้วยลวดหุ้มฉนวนแกนเดียว (เช่น 0 0.3 มม. จากสายโทรศัพท์) วงจรไฟฟ้ากระแสสลับ - สายตีเกลียว 0 0.7-1.5 มม.

ข้าว. 6. การออกแบบตัวเครื่อง: แผงด้านล่าง (1) และด้านบน (2) รูปตัวยู รูสำหรับส่วนควบคุมได้รับการเจาะในพื้นที่
จำเป็นต้องใส่ใจกับการติดตั้งตัวบ่งชี้ดิจิทัล HG1 - HG4 ที่ถูกต้อง ควรวางในระนาบเดียวกันและอยู่ในระดับเดียวกัน และเว้นระยะห่างจากขอบนำของแผงวงจรพิมพ์ที่ระยะ 2-3 มม. ตัวต้านทาน R18 และ LED VD6 อยู่ที่แผงด้านหน้าของอุปกรณ์ รูปแบบของการจัดเรียงโหนดในเครื่องวัดความถี่ (ไม่มี LFO) จะแสดงในรูปที่ 5

ข้าว. 7. แผนผังการเชื่อมต่อสวิตช์สำหรับวัดระยะเวลาของสัญญาณ
ตัวเครื่องระบุขนาดที่ต้องการแสดงในรูปที่ 6 ทำจากดูราลูมิน D16AM มีความหนา 1.5 มม. ครึ่งบนและล่างรูปตัวยูเชื่อมต่อกันโดยใช้มุมดูราลูมิน 12X 12 มม. ตรึงไว้ที่ครึ่งล่างของตัวถังซึ่งมีการเจาะรูและตัดด้าย MZ
แผงวงจรพิมพ์ติดอยู่ที่ด้านล่างของเครื่องวัดความถี่โดยใช้สกรู MZ และบูชพลาสติกสูง 10 มม.
สำหรับไมโครวงจร DD2 และ DD3 ก่อนการติดตั้งบนแผงวงจรพิมพ์ต้องตัดขาที่สามและสิบสองให้สั้นลงเพื่อให้ข้นขึ้น
การตั้งค่าอุปกรณ์เริ่มต้นด้วยการตรวจสอบการติดตั้ง จากนั้นจึงวัดแรงดันไฟฟ้าของแหล่งจ่ายไฟ ซึ่งจะต้องสอดคล้องกับที่ระบุไว้ในแผนภาพวงจร
จอแสดงผลดิจิตอลจะแสดงเลขศูนย์ สิ่งนี้บ่งบอกถึงประสิทธิภาพของเครื่องวัดความถี่ สลับ SA2 ไปทางขวาสุด (ตามแผนภาพ) และพัลส์สี่เหลี่ยมที่มีความถี่ 100 Hz จะถูกส่งไปยังอินพุตของเครื่องวัดความถี่ (โดยใช้จัมเปอร์) จากพิน 11 ของ DD1.2 ตัวเลข 0.100 ปรากฏบนจอแสดงผล ในกรณีที่มีการผสมตัวเลขต่างกัน โดยการเลือก R2 การทำงานที่ถูกต้องของตัวจำลองเครือข่ายจะเกิดขึ้น
การปรับขั้นสุดท้ายของเครื่องวัดความถี่ที่ผลิตขึ้นนั้นดำเนินการโดยใช้เครื่องกำเนิดออสซิลโลสโคปและเครื่องวัดความถี่อุตสาหกรรมเช่น G4-18A, S1-65 (N-313), 43-30
สัญญาณที่มีความถี่ 1 MHz และแรงดันไฟฟ้า 0.02 V จะถูกส่งไปยังอินพุตของเครื่องวัดความถี่ (R3) เมื่อเลือกตัวต้านทาน R5 จะได้อัตราขยายสูงสุดของทรานซิสเตอร์ VT1 โดยการเปลี่ยนความถี่และแอมพลิจูดของสัญญาณอินพุต จะควบคุมการทำงานของเครื่องวัดความถี่ตามข้อกำหนดทางเทคนิค โดยเปรียบเทียบการอ่านค่ากับอุปกรณ์ที่ผลิตจากโรงงาน
หากจำเป็นต้องวัดความถี่ต่ำด้วยความแม่นยำสูง ควรเพิ่มเวลาในการนับ ในการดำเนินการนี้ ต้องเสริมตัวสร้างช่วงเวลาอ้างอิงด้วยตัวแบ่งทศวรรษอื่น (เปิดใช้งานในลักษณะเดียวกับ DD2 และ DD3) โดยเพิ่มเวลาในการนับเป็น 10 วินาที
คุณไม่สามารถวัดความถี่ของสัญญาณอินพุตได้ แต่วัดระยะเวลาได้ สำหรับ. ในการทำเช่นนี้คุณควรแนะนำสวิตช์เพิ่มเติมในเครื่องวัดความถี่ซึ่งแผนภาพแสดงในรูปที่ 7
โวลต์ โซลูชั่น
Taganrog ภูมิภาค Rostov
"นักสร้างโมเดล-คอนสตรัคเตอร์" 10 พ.ศ. 2533
โอซีอาร์โจรสลัด
ข้าว. 2. แผนผังของอุปกรณ์:
วว1, วว4 K155LAZ;วว3 K155IE1;วว5 เค.155TM2;วว6- วว9 K176IE4;วี.ดี.6- วี.ดี.9D226A,วี.ดี.10- วี.ดี.13 D9B,เอช.จี.1- เอช.จี.4 IV สำหรับ
ข้าว. 3. เครื่องวัดความถี่ภายนอก

ร- 5. เค้าโครงขององค์ประกอบในตัวเครื่องมิเตอร์ความถี่:
1 - ตัวบ่งชี้เครือข่าย, 2 - เครือข่าย, 3 - กำลัง, 4 - ตัวยึดฟิวส์, 5 - แผงวงจรพิมพ์, 6 - ตัวกรองแสง, สวิตช์ช่วงเวลา 7 -
พัลส์รีเซ็ตเชิงลบบนตัวสะสม VT2 นั้นกลับด้านโดยทรานซิสเตอร์ VT3 ซึ่งส่งผลต่ออินพุต R ของวงจรไมโคร DD6-DD9 และรีเซ็ตการอ่าน - การบ่งชี้ผลการวัดจะหยุดลง เมื่อมาถึงด้านหน้าของพัลส์อ้างอิงถัดไป กระบวนการจะทำซ้ำ
เครื่องวัดความถี่ใช้ตัวต้านทาน MLT-0.25, ตัวเก็บประจุ K50-6 และ KLS ทรานซิสเตอร์ KT315 และ KT361 ที่ระบุในวงจร (พร้อมดัชนีตัวอักษรใด ๆ ) จะถูกแทนที่ด้วยทรานซิสเตอร์ความถี่สูงซิลิกอนที่มีโครงสร้างที่สอดคล้องกัน แทนที่จะใช้ไดโอด KD522B คุณสามารถใช้ซีรีย์ KD521, KD520 ใดก็ได้ สามารถเปลี่ยนไดโอด GD511B เป็น D9 ได้
สามารถเปลี่ยนชิปของซีรีย์ K155 ด้วยชิปที่คล้ายกันของซีรีย์ K133 ตัวบ่งชี้ IV-ZA จะถูกแทนที่ด้วย IV-3 หม้อแปลงไฟฟ้ามีกำลังไฟ 5-7 W. แรงดันไฟฟ้าที่คดเคี้ยว: II - 0.85 V (กระแส 200 mA), III - 10 V (กระแส 200 mA), IV - 10 V (15 mA) ไดโอด VD6-VD9 และ VD10-VD13 สามารถขับเคลื่อนได้จากขดลวด 10 V หนึ่งอัน (กระแสอย่างน้อย 220) VT4 มีหม้อน้ำขนาด 20X30X1 มม. ทำจากแผ่นอลูมิเนียมสองแผ่นซึ่งติดอยู่กับทรานซิสเตอร์ทั้งสองด้านโดยใช้สกรูและน็อต M3


ข้าว. 4. แผงวงจรพิมพ์พร้อมแผนผังการจัดองค์ประกอบ
เครื่องวัดความถี่ได้รับการผลิตขึ้นเพื่อทดแทนสเกลที่สอบเทียบแล้วในเครื่องกำเนิดความถี่ต่ำ (LFO) ดิจิทัลอันหนึ่งถูกลบออกจากเครื่องกำเนิดแล้ว หน้าต่างที่หุ้มด้วยลูกแก้วโปร่งใสพร้อมฟิลเตอร์สีเขียวมีตัวบ่งชี้ดิจิตอล (รูปที่ 3)
เครื่องวัดความถี่สามารถใช้เพื่อวัตถุประสงค์ที่ต้องการได้ เพื่อจุดประสงค์นี้ จึงมีการแนะนำสวิตช์ SA1 ซึ่งอยู่ที่แผงด้านหน้าของเครื่องกำเนิดไฟฟ้า
เครื่องวัดความถี่ที่พิมพ์ทำจากฟอยล์ getinax ที่มีความหนา 1.5-2 มม. (รูปที่ 4) ตัวบ่งชี้ HG1-HG4 พร้อมวงจรรวม DD6-DD9 ทำจากตัวนำพิมพ์
ขอแนะนำให้ทำทุกอย่างด้วยลวดหุ้มฉนวนแกนเดียว (เช่น 0 0.3 มม. จากสายโทรศัพท์) กระแสสลับ - สายตีเกลียว 0 0.7-1.5 มม.

ข้าว. 6. ตัวเรือน: ล่าง (1) และบน (2) แผงรูปตัวยู มีการเจาะรูสำหรับส่วนควบคุม
จำเป็นต้องใส่ใจกับการติดตั้งตัวบ่งชี้ดิจิทัล HG1 - HG4 ที่ถูกต้อง ต้องวางในระนาบเดียวกันและอยู่ในระดับเดียวกันและเว้นระยะห่างจากขอบนำของแผงวงจรพิมพ์ที่ระยะ 2-3 มม. ตัวต้านทาน R18 และ LED VD6 อยู่ที่แผงด้านหน้าของอุปกรณ์ ตำแหน่งของโหนดในเครื่องวัดความถี่ (ไม่มี LFO) จะแสดงในรูปที่ 5

ข้าว. 7. แผนผังการเชื่อมต่อสวิตช์สำหรับวัดระยะเวลาของสัญญาณ
อุปกรณ์ระบุขนาดที่ต้องการแสดงไว้ในรูปที่ 6 ผลิตจากดูราลูมิน D16AM มีความหนา 1.5 มม. ครึ่งบนและล่างรูปตัวยูเชื่อมต่อกันโดยใช้มุมดูราลูมิน 12X 12 มม. ตรึงไว้ที่ครึ่งล่างของตัวถังซึ่งมีการเจาะรูและตัดด้าย MZ
ติดตั้งที่ด้านล่างของมิเตอร์ความถี่โดยใช้สกรู MZ และบูชพลาสติกสูง 10 มม.
สำหรับไมโครวงจร DD2 และ DD3 ก่อนการติดตั้งบนแผงวงจรพิมพ์ต้องตัดขาที่สามและสิบสองให้สั้นลงเพื่อให้ข้นขึ้น
การตั้งค่าอุปกรณ์เริ่มต้นด้วยการตรวจสอบการติดตั้ง จากนั้นจึงวัดแรงดันไฟฟ้าของแหล่งจ่ายไฟ ซึ่งจะต้องสอดคล้องกับที่ระบุไว้ในแผนภาพวงจร
จอแสดงผลดิจิตอลจะแสดงเลขศูนย์ สิ่งนี้บ่งบอกถึงประสิทธิภาพของเครื่องวัดความถี่ สลับ SA2 ไปทางขวาสุด (ตามแผนภาพ) และพัลส์สี่เหลี่ยมที่มีความถี่ 100 Hz จะจ่ายจากพิน 11 ของ DD1.2 ไปยังอินพุตของเครื่องวัดความถี่ (โดยใช้จัมเปอร์) หน้าจอแสดงค่า 0.100 ในกรณีที่มีการผสมตัวเลขต่างกัน โดยการเลือก R2 การทำงานที่ถูกต้องของตัวจำลองเครือข่ายจะเกิดขึ้น
การปรับขั้นสุดท้ายของเครื่องวัดความถี่ที่ผลิตขึ้นนั้นดำเนินการโดยใช้เครื่องกำเนิดออสซิลโลสโคปและเครื่องวัดความถี่อุตสาหกรรมเช่น G4-18A, S1-65 (N-313), 43-30
สัญญาณที่มีความถี่ 1 MHz และแรงดันไฟฟ้า 0.02 V จะถูกส่งไปยังอินพุตของเครื่องวัดความถี่ (R3) เมื่อเลือกตัวต้านทาน R5 จะได้อัตราขยายสูงสุดของทรานซิสเตอร์ VT1 โดยการเปลี่ยนความถี่และแอมพลิจูดของสัญญาณอินพุต จะควบคุมการทำงานของเครื่องวัดความถี่ตามข้อกำหนดทางเทคนิค โดยเปรียบเทียบการอ่านค่ากับอุปกรณ์ที่ผลิตจากโรงงาน
หากจำเป็นต้องวัดความถี่ต่ำด้วยความแม่นยำสูง ควรเพิ่มเวลาให้มากขึ้น ชื่อบัญชี. ในการดำเนินการนี้ จะต้องเสริมตัวสร้างช่วงเวลาอ้างอิงด้วยตัวแบ่งทศวรรษอีก (เปิดใช้งานในลักษณะเดียวกับ DD2 และ DD3) โดยเพิ่มเวลาในการนับเป็น 10 วินาที
คุณยังสามารถวัดความถี่ของสัญญาณอินพุตไม่ได้ แต่วัดความถี่ได้ สำหรับ. ในการทำเช่นนี้ควรป้อนเพิ่มเติมเข้าไปในเครื่องวัดความถี่ซึ่งมีแผนภาพแสดงในรูปที่ 7
โวลต์ โซลูชั่น
เมือง ภูมิภาครอสตอฟ